通達(dá)電子有限公司|GPS全球定位系統(tǒng),GPS定位系統(tǒng),GPS定位器|GPS定位|gps衛(wèi)星定位系統(tǒng)|gps個(gè)人定位器|汽車防盜器|車載GPS定位系統(tǒng)|汽車GPS定位|GPS廠家-衛(wèi)通達(dá)")

- 你的位置:
- 首頁
- 新聞中心
- GPS知識(shí)
GPS車輛衛(wèi)星定位模擬系統(tǒng)設(shè)計(jì) (1)
- 發(fā)布日期: 2012-03-07
- 生成日期: 2022/6/1
- 發(fā) 布 人: 衛(wèi)通達(dá)
- 信息來源: 微計(jì)算機(jī)信息
1.引言
目前車載技術(shù)已經(jīng)非常成熟,它廣泛應(yīng)用于私家車的防盜跟蹤,物流用車的調(diào)度控制,出租車的電招安防,公交車的智能報(bào)站電子站牌等等,而且它價(jià)格也變得十分便宜。市場(chǎng)上幾百元就能買得到[1]。它的核心技術(shù)就是GPS,而電子地又是GPS的靈魂,只有通過它才能實(shí)現(xiàn)車輛的定位,當(dāng)確定了車輛位置之后,通過無線傳輸把數(shù)據(jù)發(fā)到第三方,這樣就可以實(shí)現(xiàn)車載定位,根據(jù)這種技術(shù),我們建立了一種能夠模擬車輛運(yùn)行的模型,它能通過GPS定位系統(tǒng)確定車輛的位置,通過無線傳輸系統(tǒng),把車輛的位置信息發(fā)送到控制中心,再有控制中心時(shí)發(fā)送控制指令給車輛,讓車輛到達(dá)指定的位置,也就是建立了一種通過GPS/GSM“無人駕駛”車輛系統(tǒng)的模型,當(dāng)然這種模型是建立在高速公路上的,當(dāng)司機(jī)開上高速公路以后可以通過控制按鈕向工作站發(fā)出指令,工作站確認(rèn)后,在告知司機(jī),此后車輛進(jìn)入“無人駕駛”狀態(tài),車的行使由控制中心決定,當(dāng)?shù)礁咚俟烦隹跁r(shí)控制中心會(huì)告知司機(jī)這時(shí)又會(huì)把車的駕駛權(quán)交還給用戶,為了防止意外發(fā)生,用戶還可以隨時(shí)中斷與控制中心的連接。
本系統(tǒng)模擬了這一模型,把GSM作為數(shù)據(jù)傳輸?shù)拿浇椋肞C機(jī)當(dāng)作是控制中心,用小車代替車輛,在校園里模擬車輛的運(yùn)行,首先由GPS發(fā)出位置信息,再由GSM把信息傳送給PC機(jī),經(jīng)過PC機(jī)處理,顯示小車在地圖上的位置,再由PC機(jī)在發(fā)出指令,通過GSM把指令傳送給小車,小車在執(zhí)行指令。
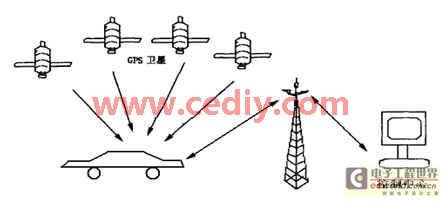
圖1. 無人駕駛控制系統(tǒng)模型
2.系統(tǒng)實(shí)現(xiàn)理論概述
GPS目前空間衛(wèi)星星座部分共有二十四顆衛(wèi)星,其中二十一顆工作衛(wèi)星,三顆在軌備用衛(wèi)星。每顆衛(wèi)星都裝有4 臺(tái)高精度電子鐘,為GPS 定位提供高精度的時(shí)間標(biāo)準(zhǔn)。用戶設(shè)備主要由GPS 接收硬件和數(shù)據(jù)處理軟件,以及微處理器及其終端設(shè)備組成。
GSM 網(wǎng)絡(luò)是國(guó)內(nèi)覆蓋范圍最廣,應(yīng)用最普遍的無線通信網(wǎng)絡(luò)。它傳輸速度快,單個(gè)數(shù)據(jù)傳輸價(jià)格便宜,不占用話音,及其雙向傳輸?shù)男阅埽煞奖愕貙?shí)現(xiàn)對(duì)于采集站設(shè)備的信息采集和遠(yuǎn)程控制,實(shí)現(xiàn)遙控、遙測(cè)等。因此,使用GSM是作無線通訊是十分合理的。
3.系統(tǒng)實(shí)現(xiàn)方案設(shè)計(jì)
在設(shè)計(jì)中使用了Trimble公司的GPS模塊用于小車定位,使用了兩個(gè)西門子公司的GSM模塊用于小車和PC機(jī)的無線數(shù)據(jù)傳輸,通過按鍵輸入完成小車部分的設(shè)置,用液晶顯示當(dāng)前的信息,而在PC機(jī)上用串口和GSM模塊通信,再由基于VB平臺(tái)所編寫的電子地圖上顯示出來。
4.硬件系統(tǒng)設(shè)計(jì)
4.1電源穩(wěn)壓部分
本系統(tǒng)的電源為7.5V,而單片機(jī)的工作電壓為5V,LM7805是5V支流穩(wěn)壓電源芯片片。
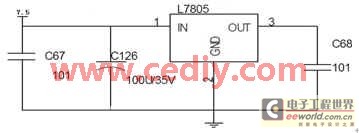
圖2 系統(tǒng)電源
4.2 GPS接口電路
由于51系列單片機(jī)的電平為TTL電平,而GPS模塊為3.3V供電,所以選用LM1117作為GPS模塊的電源,通信部分選用了MAX3232把3.3V的邏輯電平轉(zhuǎn)換成232電平。
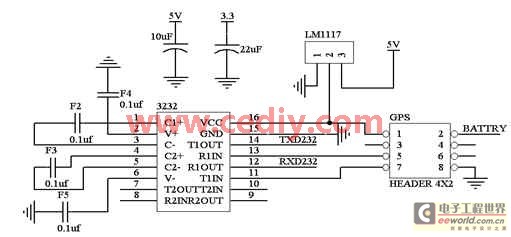
圖3 GPS接口電路圖
4.3GSM接口電路
在GSM模塊的使用中,它的供電范圍很寬7.5~24V,而且它的輸出電平為232電平這樣就可以這接引出串口通信數(shù)據(jù)線。
4.4 GSM/GPS控制部分
由于我們使用的單片機(jī)只有一個(gè)串口,這就要我們對(duì)串口進(jìn)行切換,我們選用的是繼電器,但由于單片機(jī)的I/O口驅(qū)動(dòng)電流很小,繼電器不能工作,這樣我們采用ULN2003作為驅(qū)動(dòng),它是反向驅(qū)動(dòng)開路輸出達(dá)林頓,如圖2,我們采用單片機(jī)管電流的方式驅(qū)動(dòng)繼電器。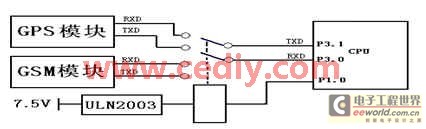
圖5 GSM/GPS控制部分
4.5電機(jī)控制部分
電機(jī)控制部分我們采用繼承電機(jī)驅(qū)動(dòng)芯片L298,它的性能比較穩(wěn)定,而驅(qū)動(dòng)電流較大。其電路圖如下。
4.6顯示部分
在顯示部分我們采用12864液晶,為了使硬件結(jié)構(gòu)簡(jiǎn)單我們采用了串行方式。

5.軟件實(shí)現(xiàn)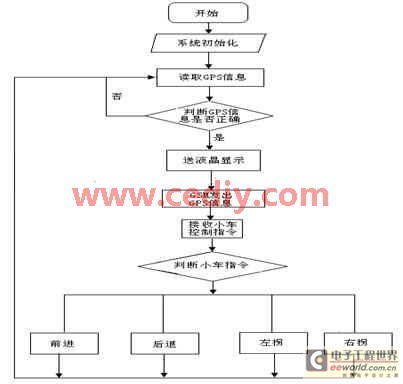
圖7 小車控制部分流程圖
6.結(jié)論
本系統(tǒng)實(shí)現(xiàn)了GPS車輛定位系統(tǒng)的模擬運(yùn)行。利用GSM作為數(shù)據(jù)傳輸介質(zhì),實(shí)驗(yàn)小車代替實(shí)際車輛,由PC機(jī)作為車輛控制中心,對(duì)小車位置信息進(jìn)行處理并指揮小車運(yùn)動(dòng)。經(jīng)過軟件測(cè)試系統(tǒng)實(shí)現(xiàn)了小車位置的采集,而且發(fā)出指令也能讓小車接收,并執(zhí)行。
本文作者創(chuàng)新點(diǎn):將單片機(jī)、GPS、GPRS三個(gè)技術(shù)加以綜合,并且合理有效的應(yīng)用到車輛監(jiān)控系統(tǒng)中,實(shí)現(xiàn)了車輛的實(shí)時(shí)監(jiān)控調(diào)度,提高車輛的安全性與工作運(yùn)行效率。該系統(tǒng)已在我校校園巡邏車系統(tǒng)上運(yùn)行,為學(xué)校節(jié)省近萬元資金。實(shí)踐證明本系統(tǒng)的通訊功能運(yùn)行可靠,設(shè)計(jì)合理。
整理:洪麓豐